



南京远驱旧版是南京远驱科技有限公司推出的一款远程监控机器的软件,作为老版本,它保留了原版内容,方便偏好旧版的用户继续使用。这款手机软件能便捷地监测电机转速、电池电压、电流、输出功率及工作状态,还可对运行所需的各类参数进行配置,绘制工作曲线以实时掌握电机工作特性;通过调试参数,能让电机处于匹配优化的工作状态。

1.这款手机软件能够轻松且快速地对马达的速度、电压、电流、输出功率以及运行状况进行监控。
2.界面设计简洁大方且美观精致,视觉呈现富有高级感,操作流程直观易懂,不仅支持在线联机更新,还能借助软件对控制器进行更新操作。
3.实时把握电动机的运行特性,开展参数调试工作,确保其处于最优匹配状态。
1、当然这个过程其实非常简单,每个控制器在生产时都有一个独特的二维码
2、成功后就能顺利连接控制器使用了,实际上整个操作流程还是挺便捷的
3、不少用户不清楚如何连接软件的控制器,只有在完成调试并成功连接控制器后,才能实现远程控制功能。
4、通过软件扫描后使用,即可绑定对应的设备,设备绑定完成后,再进行内容与操作方面的调试
5、当然,这个流程并不复杂,每一台手柄在生产完成后,都会配有一个独一无二的QR码。
6、不少使用者不清楚如何与软件控制器连接,往往需要通过对软件控制器进行调试才能解决问题。
1.扫描完成后,用户就能对对应的设备进行绑定操作,接着开展安装与调试工作,而远程控制功能必须在控制器调试完成之后才可以使用。
2.每一台控制器都拥有独一无二的二维码,扫描与绑定这类操作对用户而言十分简单,能够轻松掌握。
3.自动学习功能、数据曲线分析以及工作效率的提升,为南京远驱控制器的调试工作提供了良好助力。
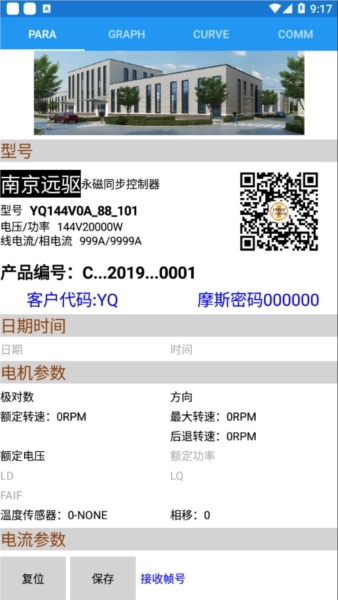
1、首先打开已安装好的软件,进入软件界面后点击“通信”选项,具体操作可参考下图;

2、在通信界面我们接着点击下方的“登录”按钮;

3、最后用手机号或者邮箱完成注册登录就可以了,是不是挺简单的呢。

1.明确界定控制器自身对应的电动车正负极,将粗红色线与粗黑色线设定为基础正负极,其中粗红色线是控制器的正极,粗黑色线是控制器的负极。
2.找到电机相线,插头基本相同。只需插入即可。
3.找到传输电缆,把它连接到控制器上,接着转动传输装置。
4.连接并断开制动线。在已拆下的发动机罩位置,找到制动杆,能看到有一根黑色电线缠绕在两根电线之间。其中一根黑色电线是闲置的,无需使用,另一根则需依据自身颜色与控制器相连。完成制动导线与控制器的连接后再断开。
5.连接仪表电缆前,需先打开仪表并确认控制仪表。随后可依据颜色标识,将其与控制器仪器相连。
5.1三速控制:高速档,中速档,低速档。
电流比例通过4个参数调节。
高速档位:在手机或电脑上会显示为D。此时设备会全力输出动力,运行时的线电流、相电流以及转速都会达到最大值。
中速档:手机或电脑上会显示“DM”标识。此时动力仅部分输出,相电流大小会对起步加速性能产生影响,线电流则关系到最高车速,同时还设有转速限制。通常的设定标准为:中速档的相电流比例为最大相电流的75%,线电流比例为最大线电流的50%。
低速档:在手机或电脑上会显示为DL。此档位下动力仅开启一部分,相电流会对起步加速产生影响,线电流则会影响最高车速,同时还设有转速限制。通常情况下,低速相电流的比例设定为最大相电流的50%,低速线电流的比例设定为最大线电流的25%。
5.2停止回流,最大回流:反充电时的充电电流限制。
关于电子刹车功能的工作流程如下:当车辆进行刹车操作时,整车系统会向控制器发送刹车信号;控制器在接收到该信号后,会通过切断回流电流的方式实现电子刹车,同时确保刹车过程中的电流不会超出设定的最大回流值。
使用电子刹车功能时,需先在跟随项中选择电子刹车以启用该功能,并设置回流电流。设置参数时,最大回流通常要比停止回流大25%至50%。
5.30电量系数,满电量系数:。
默认设置是22。市面上大部分电机和整车采用的值。
不过部分电机类型与整车的匹配度欠佳,在起步低速阶段以及中速行驶时,会明显感觉到共振和抖动的现象。而调整LM值能够对这种情况起到改善作用。
先从22这个数值开始调试,如果在低速段加速时出现抖动现象,就降低LM参数,依次尝试16、14、12、11、8、5这些数值来测试效果——其实中间的其他数值也可能产生作用,不过通常建议优先选择稍大的数值,尽量避免调得太小。因为LM值过小会导致电流失控,进而触发MOE或OVER保护机制,严重时甚至可能烧毁控制器。因此,当抖动现象消失时对应的LM值就是最佳参数,之后不要再继续调小了。
请注意:MOE值为1时,意味着MOE保护处于有效状态;当MOE值为0时,则表明MOE保护未生效。
5.4欠压保护:。
有些电机和整车在LM值为22时运行得十分顺畅,可一旦调小这个参数,反而容易出现抖动现象。因此需要留意:如果在LM=22的状态下设备运转正常,就不必对该参数进行调整。
或者当发现抖动共振现象出现后,将LM值从22依次调小到16、14……甚至5都没有明显改善效果时,就说明该参数与抖动共振问题无关。这种情况下务必将LM值改回最大值(例如22),而非将某个随意调整的数值保留在控制器中。
5.5速度表校准
霍尔脉冲仪表:其霍尔脉冲个数范围为1到16,485仪表能够借助该脉冲数来校准速度显示。
模拟仪表:60V对应10000RPM
5.6速度表方式:脉冲/模拟/隔离脉冲
5.7:巡航
巡航包含接地巡航与浮空巡航两种模式,通常会选用接地巡航——具体操作是让巡航线与地面接触,以此激活巡航功能,车辆便会按照当前速度自动行驶。若要退出巡航切换至手动驾驶模式,只需再次按下巡航按钮、踩下油门踏板或制动踏板即可。
请注意,巡航的最高速度受低速档最高转速的限制。要是在转速超过低速档最高转速时开启巡航功能,车辆进入自动行驶状态后,会自行将速度降低至低速档最高转速对应的行驶速度。
南京远驱定速与弱磁:
2.1定速:指电机在额定电压条件下运转时的转速,这一转速也被简称为额定转速,而在电摩行业中,人们常常将其称为定速。
这个定速值决定了电机能够达到的最高转速。通常情况下,普通控制器在额定电压的工作状态下,能够驱动电机使其转速接近这个定速值。
2.2扩速:把电机的运行速度提升至超过其额定定速的范围,这一操作被称为扩速。
提升速度的第一种方法:增加工作电压,电压数值越大,电机的转动速度就越快。
扩速方法二:在不提升工作电压的前提下,借助弱磁手段来提高电机的转速。
2.3南京远驱控制器运用弱磁扩速技术:在不改变电池电压的前提下,直接借助调控限流参数的方式提升电机转速。
1.4最大转速,后退转速:限制了电机最高转速。
在电动车市场中,通常不对最大转速进行限制,而是借助后续的限流参数来约束最高转速。
当速度超出定速范围后,系统会自动切换至弱磁运行状态。转速与定速的差值越大,弱磁的程度也就越深。

1、要清楚区分控制器与电动车的正负极,通常以粗红、粗黑两种颜色的线作为正负极标识,其中控制器的粗红线对应正极,粗黑线对应负极。
2、找到电机相位线,这些插头的规格基本一致,直接插好即可。
3、寻找转把线,对接到控制器上,转动转把。
4、连接刹车断电线时,先在拆开的头罩位置找到刹车把,能看到有一根黑色线,里面裹着两根线,其中一根黑色的是无用线,无需处理;另一根则根据其颜色,找到控制器对应的接口接上,即可完成控制器刹车断电的连接。
5、连接仪表线时,需先打开仪表,确认哪一根是控制仪表的线路,再依据其颜色,将其连接到控制器仪表上即可。
下载排行





 阿美变声器
阿美变声器 鉴定师9.1免费版
鉴定师9.1免费版 鸿蒙系统
鸿蒙系统 视频拼接
视频拼接 AI字幕
AI字幕 李跳跳安卓12版
李跳跳安卓12版


