



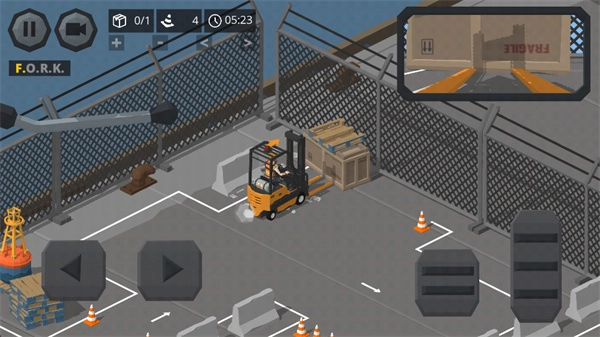
叉车极限物理模拟器2以工业搬运及真实物理互动为核心,故事背景设定于大型仓储中心、港口集装区和复杂物流园区。这里的货物堆叠形态各异,重量分布与体积大小存在显著差别,操作时需兼顾空间判断与载重平衡来做出调整。叉车在移动、升降和转向的过程中,重心变化会对其产生影响,稍有差错就可能造成货物倾倒或滑落。环境里还设有狭窄通道、坡道地形以及高低平台结构,让搬运过程充满变数与挑战。不同任务会涉及不同类型的货物,从普通纸箱到大型机械部件,每一种都需要采用不同的处理方法,装卸顺序和路径选择会直接影响整体的效率。随着任务的推进,复杂场景会逐渐增多,比如多点装载、有时间限制的运输以及不稳定的堆叠结构,操作节奏也会慢慢加快,需要在有限的空间内完成精准移动和稳定控制。整个过程着重强调对真实物理反馈的理解与适应,通过不断尝试来掌握平衡技巧和路径规划能力。
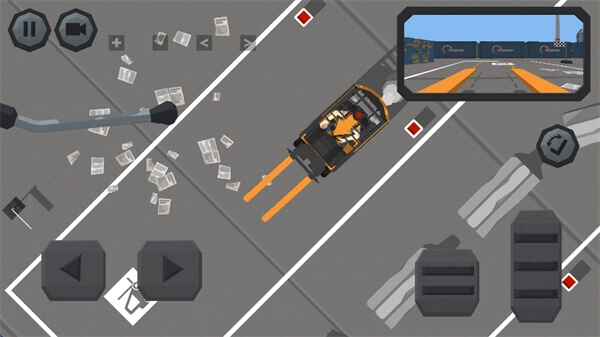
1、采用真实物理反馈机制,叉车的移动、倾斜动作以及载重的变化,均会对整体的平衡状态产生影响;
2、多场景物流环境设计,不同区域拥有各异的空间构造与搬运难度。
3、多类型货物的处理方式,因货物重量与形状各异,会产生不同的操作要求。
1、物理模拟的细节十分丰富,货物在堆叠和掉落的过程中能呈现出真实的反馈效果;
2、场景的结构复杂且变化多端,狭窄的通道以及高低不一的平台加大了操作上的挑战。
3、任务类型呈现逐步升级的态势,从基础的搬运任务到多点运输任务,形成了递进式的难度梯度。
4、节奏变化十分显著,从缓慢的状态逐步过渡到高强度操作阶段,速度在这个过程中不断加快;
5、操作的容错空间比较小,每一次移动都得进行精准的判断和控制;
1、操作叉车开展货物搬运工作,借助调整角度和高度来维持平衡状态;

2、依据货物的重量和形状,挑选适宜的搬运方法并进行路径规划;

3、在复杂场景下执行装卸作业,防止出现碰撞和倾倒的状况;
4、针对多阶段的运输任务,在给定的限定条件下,达成连续操作的目标
下载排行





 放置音乐节
放置音乐节 丰裕之角安卓
丰裕之角安卓 鱿鱼模拟器小游戏最新版
鱿鱼模拟器小游戏最新版 口袋商业街中文版
口袋商业街中文版 冒险迷宫村汉化
冒险迷宫村汉化 袖珍伙伴
袖珍伙伴 樱舞少女的轮舞曲
樱舞少女的轮舞曲










